2D TV Denoising#
![]()
Import libraries#
import numpy as np
import cv2
from matplotlib import pyplot as plt
import scipy.signal as signal
from scipy.signal import convolve2d
import scipy.fft as fft
import urllib.request
from skimage.metrics import peak_signal_noise_ratio as PSNR
import time
Import image#
# Reading image (grayscale)
url = "https://i.stack.imgur.com/kP0u2.png"
# url='https://encrypted-tbn0.gstatic.com/images?q=tbn:ANd9GcSRsK5QFJ1arEQlnHEJ-020xbO30BgdYgPJBg&usqp=CAU'
# url='https://unsplash.com/photos/IoZA1Mwiq2g/download?ixid=MnwxMjA3fDB8MXxzZWFyY2h8MTZ8fGJsYWNrJTIwYW5kJTIwd2hpdGUlMjBmbG93ZXJ8ZW58MHx8fHwxNjc5MzQxODY4&force=true&w=640'
with urllib.request.urlopen(url) as url_response:
img_array = np.asarray(bytearray(url_response.read()), dtype=np.uint8)
img = cv2.imdecode(img_array, cv2.IMREAD_GRAYSCALE)
# img is a 3-dimensional numpy array (third number indicates channel)
# Converting to (0,1)
x = img.astype(float) / 255.0
print(type(img))
print(img.shape)
plt.imshow(x, cmap="gray")
<class 'numpy.ndarray'>
(512, 512)
<matplotlib.image.AxesImage at 0x7fd279cec700>
Define conv and fft functions#
# Define some of the operators that we need...
def conv2d_fft(x, h):
p0 = x.shape[0] - h.shape[0]
p1 = x.shape[1] - h.shape[1]
h_pad = np.pad(h, ((0, p0), (0, p1)))
Fh = fft.fft2(h_pad)
Fx = fft.fft2(x)
return np.real(fft.ifft2(Fx * Fh))
def conv2dT_fft(x, h):
p0 = x.shape[0] - h.shape[0]
p1 = x.shape[1] - h.shape[1]
h_pad = np.pad(h, ((0, p0), (0, p1)))
Fh = fft.fft2(h_pad)
Fx = fft.fft2(x)
return np.real(fft.ifft2(Fx * np.conj(Fh)))
# def conv2d_fft(x, h):
# return convolve2d(x, h, mode='same', boundary='wrap')
# def conv2dT_fft(x, h):
# # rotate the kernel by 180 degrees
# h_rotated = np.rot90(np.rot90(h))
# # perform the flipped kernel convolution
# return convolve2d(x, h_rotated, mode='same', boundary='wrap')
Noise function#
def awgn(img, n):
"""Generating Gaussian Noise
with 0 mean and standard deviation n
choose n between 0,1 for normalized image"""
noise = np.random.randn(*img.shape) * n
# Add the noise to the input image
noisy_image = img + noise
return noisy_image
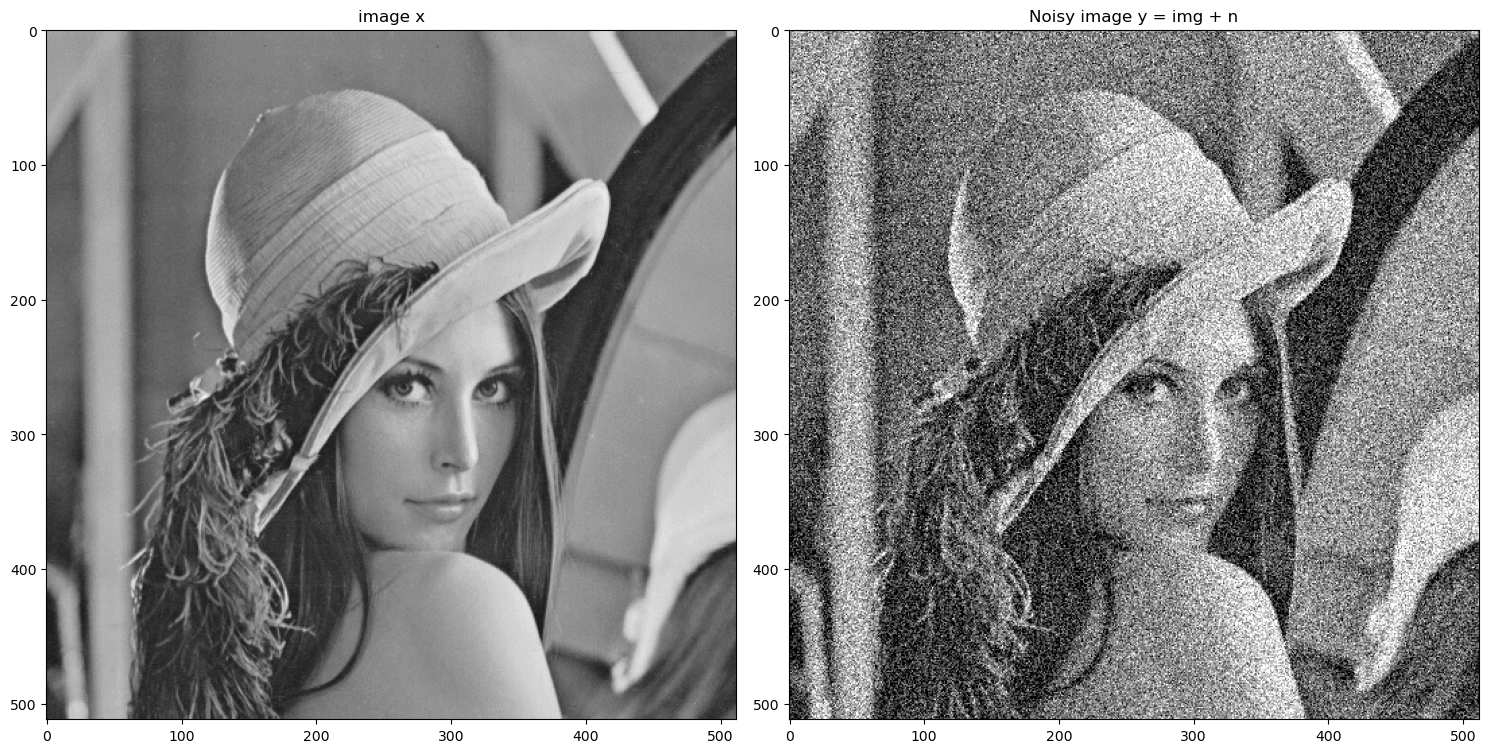
Add noise to the image#
"""
y1 = img + n
"""
# Add noise to the image
y1 = awgn(x, 0.2)
fig = plt.figure(figsize=(15, 15))
plt.subplot(121)
plt.imshow(x, cmap="gray", clim=[0, 1])
plt.title("image x")
plt.subplot(122)
plt.imshow(y1, cmap="gray", clim=[0, 1])
plt.title("Noisy image y = img + n")
plt.tight_layout()
plt.show()
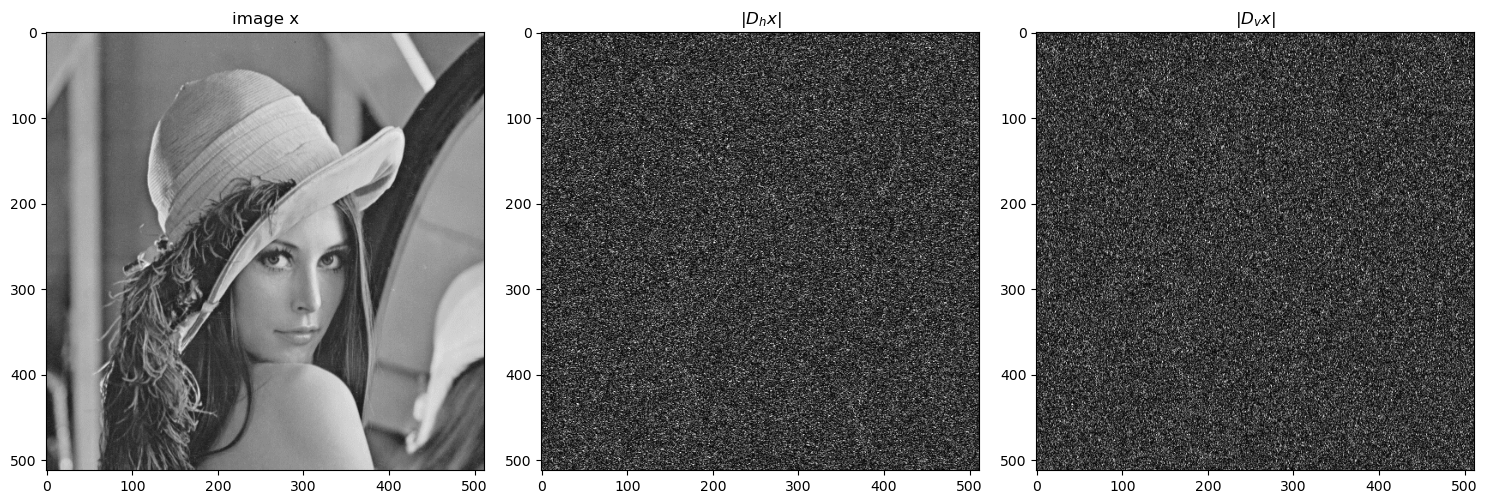
Gradiant operator#
# define gradient operators
"""
I am testing it with y1 for now
"""
dh = np.array([[1, -1], [0, 0]]) # horizontal gradient filter
dv = np.array([[1, 0], [-1, 0]]) # vertical gradient filter
Dh = lambda x: conv2d_fft(x, dh)
Dv = lambda x: conv2d_fft(x, dv)
DhT = lambda x: conv2dT_fft(x, dh)
DvT = lambda x: conv2dT_fft(x, dv)
# plot the image x and the gradient images Dh x and Dv x
fig = plt.figure(figsize=(15, 15))
plt.subplot(131)
plt.imshow(x, cmap="gray", clim=[0, 1])
plt.title("image x")
plt.subplot(132)
plt.imshow(np.abs(Dh(y1)), cmap="gray", clim=[0, 1])
plt.title(r"$|D_hx|$")
plt.subplot(133)
plt.imshow(np.abs(Dv(y1)), cmap="gray", clim=[0, 1])
plt.title(r"$|D_vx|$")
plt.tight_layout()
plt.show()
TV-denoising Solver#
Write TV-denoising formulation with explanation here later
def TV_denoising(y, lamb=2, rho=1e1, maxiter=200):
"""
TV-denoising solver to solve
minimize 0.5 |x-y|_2^2 + lambda|Dx|_1
"""
# define the soft-thresholding function
"""
In the TVD case we have :
Vector (v): Dx_(k+1) + u_(k)
Threshold (t): lamb/rho
"""
start = time.time()
soft_thresh = lambda v, t: np.maximum(np.abs(v) - t, 0.0) * np.sign(v)
# DDT
"""
DDT = please check notes for fourier transform format
"""
# Calculating the difference between sizes x and d for padding purpose
p0 = x.shape[0] - dh.shape[0]
p1 = x.shape[1] - dh.shape[1]
dh_pad = np.pad(dh, ((0, p0), (0, p1)))
p0 = x.shape[0] - dv.shape[0]
p1 = x.shape[1] - dv.shape[1]
dv_pad = np.pad(dv, ((0, p0), (0, p1)))
# Refer to Parisima's notes for computing DDT using FFT
DDT = np.abs(fft.fft2(dh_pad)) ** 2 + np.abs(fft.fft2(dv_pad)) ** 2
# -----------------------------
# initilize iteration variables
zh = np.zeros_like(y)
zv = np.zeros_like(y)
uh = np.zeros_like(zh)
uv = np.zeros_like(zv)
x_hat = np.zeros_like(y)
# For computing error
J = np.zeros(maxiter)
for k in range(maxiter):
# solve the L2-L2 problem (update x)
rhs = y + rho * (DhT(zh) + DvT(zv)) - DhT(uh) - DvT(uv)
F_rhs = fft.fft2(rhs)
x_hat = np.real(fft.ifft2(F_rhs / (rho * DDT + 1)))
# solve the TV problem (update z)
zh = soft_thresh(Dh(x_hat) + uh, lamb / rho)
zv = soft_thresh(Dv(x_hat) + uv, lamb / rho)
# update u
dual_h = Dh(x_hat) - zh
dual_v = Dv(x_hat) - zv
uh = uh + dual_h
uv = uv + dual_v
# compute the error
J[k] = (dual_h**2).sum() + (dual_v**2).sum()
end = time.time()
return x_hat, J, end - start
x_hat, J, duration = TV_denoising(y1, lamb=0.2, rho=2, maxiter=50)
fig = plt.figure()
fig.set_size_inches(5, 7.5)
ax = fig.add_subplot(321)
ax.imshow(x, cmap="gray", clim=[0, 1])
plt.title("original image")
ax2 = fig.add_subplot(322)
ax2.imshow(y1, cmap="gray", clim=[0, 1])
plt.title("noisy image")
ax3 = fig.add_subplot(323)
ax3.imshow(x_hat, cmap="gray", clim=[0, 1])
plt.title("recovered image")
ax4 = fig.add_subplot(324)
ax4.semilogy(range(len(J)), J, "b-", lw=2)
plt.title("Convergence")
plt.xlabel("iteration (k)")
plt.tight_layout()
plt.show()
print(f"Time taken = {duration}")
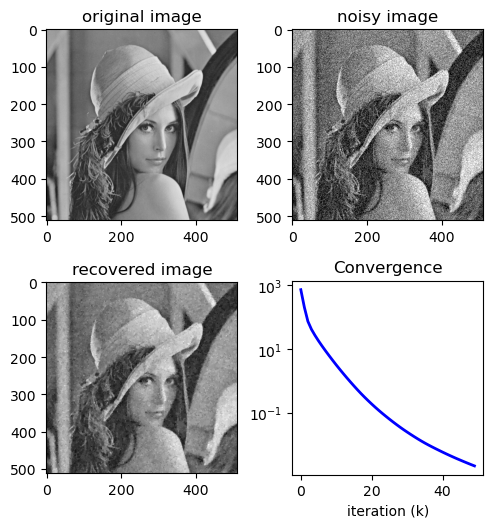
Time taken = 7.681538105010986
y2 = awgn(x, 0.5)
x_hat, J, duration = TV_denoising(y2, lamb=0.7, rho=2, maxiter=50)
plt.imshow(x_hat, cmap="gray", clim=[0, 1])
print(PSNR(x, x_hat.clip(0, 1)))
22.53278712663882